Kit pédagogique Robotique
C'est ici que vous trouverez les infos/l'avancé du projet de kit pédagogique du Fablab autour de la robotique
Guide péda et fiche Action
C'est ici que vous trouverez les infos qui concernent l'orientation du projet et ses supports pédagogiques !
Fiche Action
"Kit pédagogique Robotique"
Le projet en 1 phrase
On souhaite développer un Kit robotique qui servira de support pour divers ateliers. Celui-ci pourra aussi être à dispos des animateurs/enseignants !
POURQUOI ?
Quel est le résultat attendu, l'objectif ?
En quoi ça fait avancer le projet associatif du Fablab ?
Le Fablab souhaite faciliter le montage de nouveaux ateliers autour de la robotique mais aussi, en parallèle, développer un kit qui sera essaimable à destination des écoles/structure de médiation numérique et technique.
POUR QUI ?
En fonction du contenu, les enfants des cycles 3 et 4 sont les publics ciblés.
COMMENT ?
De quelle manière on déploie le projet :
La durée, le lieu ?
Combien d'animations ? Des formations ? des formats autres ?
En l'état, on imagine le développement et la documentation de 3 objets :
-Un robot type roue/chenille
-un bras articulé
-une manette sans fils
On accompagne ces objets de guide pédagogiques pour leur utilisation,leur construction, leur interaction
Avec qui ?
Avec qui on se projette ?
Combien de temps d'animateur ? nombre de bénévoles ?
Qui sont les partenaires ?
Matériel et besoin technique ?
€€ Combien ça va coûter ? €€
Coût du matériel ?
Temps salarié ?
Location de salle, communication, prestas ?
Ne pas oublier de calculer la valorisation bénévole. (On considère que si on devait payer le travail bénévole,
il coûterait 20€/heure au projet, donc on le calcule pour mettre en avant le dynamisme de l'asso)
Les indicateurs mesurables
Pour rendre le projet sérieux auprès d'un financeur potentiel, on propose des indicateurs, comme :
Indicateurs quantitatifs :
-Nombres de participants
-Nombre d'objets crées
-Catégorie socio-pro
Indicateurs qualitatifs :
-Parité
-retour positifs des personnes
-Retour des partenaires
Le projet en 1-2 paragraphes
Une fois toutes ces étapes passées, le projet semble en bonne voie,
Plus qu'à le résumer/développer ci dessous en quelques lignes et on a tout ce qu'il faut pour :
- dégainer le projet
-le proposer à un partenaire
-le défendre auprès d'un financeur
===> Bravo !
Le Kit
La manette
Analyse fonctionnelle (cahier des charges) de l'objet :
Au fait, c'est quoi une analyse fonctionnelle?
Les besoins :
Un objet qui transmet les commandes de l'utilisateur à un autre objet (robot) : une manette quoi !
Les contraintes :
- L'objet doit pouvoir être facilement reproductible dans un fablab (découpe laser, impression 3D, un peu de soudure...)
- L'objet doit pouvoir être programmable via une interface Block comme vittasciences
- Les composants de la manette doivent pouvoir se trouver facilement et être bien documentés
- L'objet doit pouvoir communiquer via un protocole sans fils (bluetooth/wifi)
- L'objet doit pouvoir embarquer sa propre source d’énergie (Ni-mh, Lithium-Ion, fusion nucléaire...)
- L'objet doit pouvoir (autant que possible) être démontable et réutilisable l'année suivante pour un autre atelier ?
- l'objet doit être sécurisé et sécurisant...
- Naturellement, le coût de construction dois-être contenu !
Premier plan avec drawy
Drawy est super outils de prise de note en vrac, très graphique ! (un peu comme OneNote)
Les composants de la manette
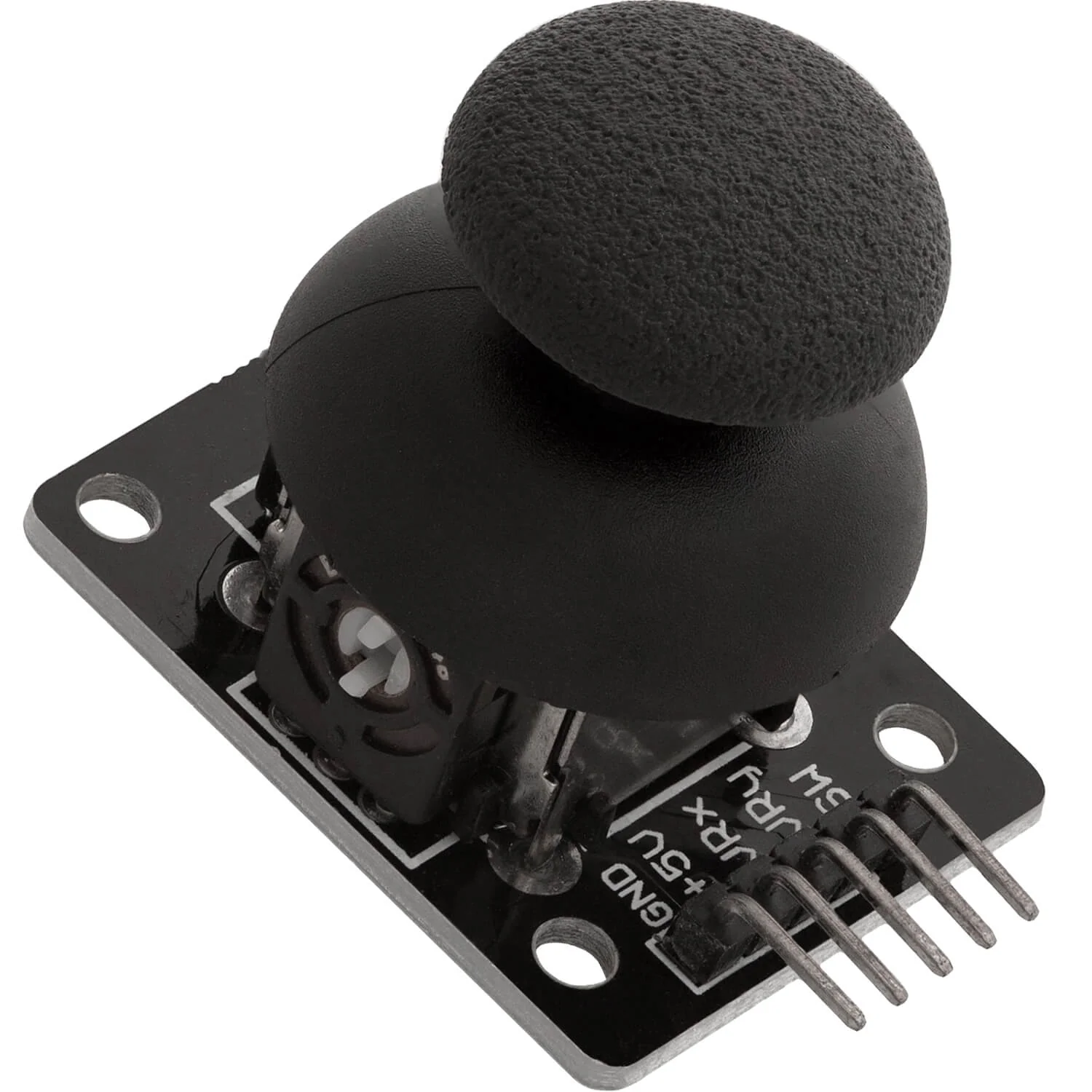
Un Joystick type PS2 HW-504
Il s'agit d'un joystick très utilisé dans les kits pédagogique. Son fonctionnement est simple : le mouvement du stick fait varier 2 potentiomètres, la mesure est donc remontée au micro-contrôleur via 2 entrées analogiques!
Un clic-bouton est également présent sur le montage.
La datasheet (documentation) ici
--
 Un Micro-Controleur de type ESP32 VROOM (Le classique de chez Espressif System)
Un Micro-Controleur de type ESP32 VROOM (Le classique de chez Espressif System)
Pourquoi on l'aime ?
- Il s'agit d'une puce très répandu et bien géré par les interfaces comme VittaScience
- Elle a de nombreuses entrées analogiques et numériques
- Elle gère le Wifi et le Protocole ESP-Now (on y reviendra)
--
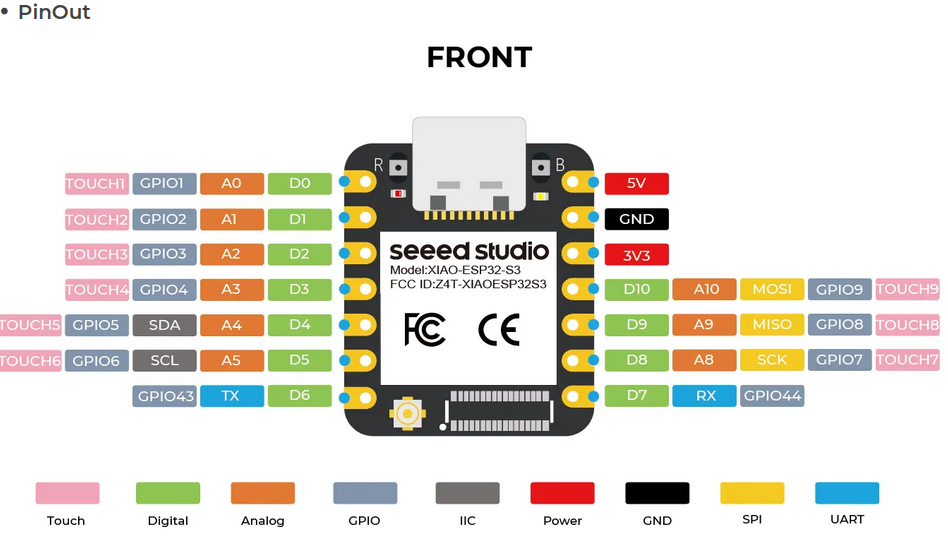
Premiers tests sur un ESP32 S3 (Seeed Studio)