Template : guide pédagogique
Guide pédagogique "BlablaBla"Test"
🎯 Objectifs principaux :
- S'initier à la soudure à l’étain
- s'autonomiser sur la découpeuse laser
- ...
Objectifs secondaires :
- Découvrir le fonctionnement de ....
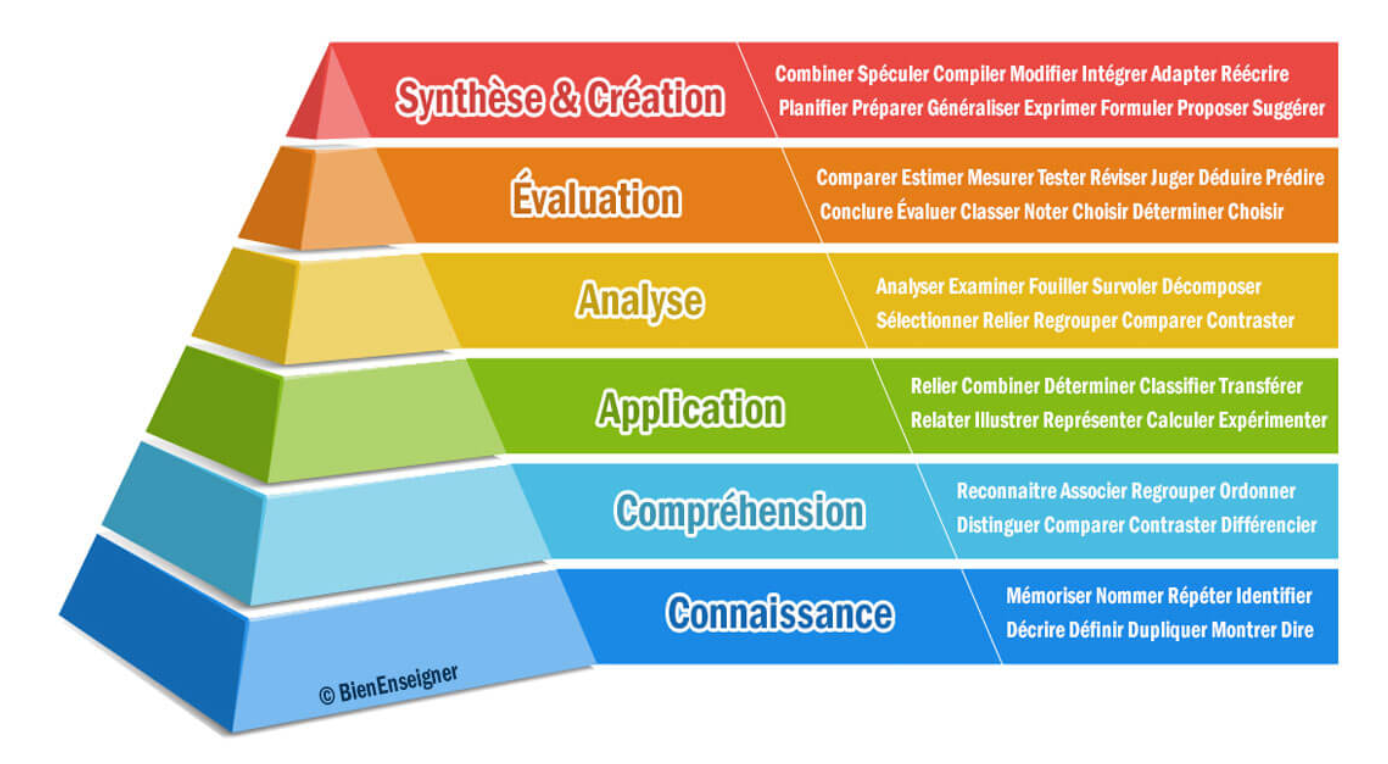
Le verbe d'action ci-dessus en orange est important dans le cadre des objectifs que l'on se fixe pour l'animation.
Il va dépendre du public visé par l'animation / la formation , deux exemples :
-Être en capacité d'identifier un système
-Être en capacité d’analyser et de comprendre un système.
On est pas du tout sur le même point de départ!
D’où l'importance des pré-requis...
👥 Public cible : "Adultes,
Nombreans
6 participants max
📋 Pré-requis :
🕒 Durée de participantsl'atelier : "6"2h" "2 séances de 3 heures"
🛠️ Matériel à préparer
🏁 Déroulé de l'animation
Soudure des composants 1h15
Attention au risque de brulure !
Test du code 45min Les apprenants vont sur...L'animateur est en posture de... Débriefing 15min
ne pas hésiter à ....
Possibilité de détailler le déroulé sans utiliser ou en plus du tableau ...
Exemple : le code corrigé
#include <Servo.h>
#define PIN_SERVO_3 3
Servo servomotor_3;
void serial_setupConnection(long baudrate) {
Serial.begin(baudrate);
while (!Serial) {
Serial.println("En attente de l'ouverture du port série...");
delay(1000);
}
Serial.println("Port série activé. Baudrate: " + String(baudrate));
delay(50);
}
void setup() {
serial_setupConnection(9600);
servomotor_3.attach(PIN_SERVO_3);
Serial.println("Bonjour !");
}
void loop() {
servomotor_3.write(90);
}